AI 人工智能和機械人技術
Tesla 正大規模地在車輛、機械人等領域開發和部署自主運作系統。我們深信利用先進 AI 技術為基礎,以及運用智能學習硬件,是實現全自動駕駛、雙腳步行機械人及普及應用更多技術的唯一途徑。
Tesla Bot
創造通用、可雙腳步行的自主人形機械人,讓其能夠執行不安全、重複或沉悶的任務。要達到這個最終目標,便需要建構軟件來實現機械人平衡、導航、感知以及與現實世界的互動。我們正在招聘深度學習、電腦視覺、動作計劃、控制、機械及一般軟件工程師,以解決我們某些最嚴峻的工程挑戰。

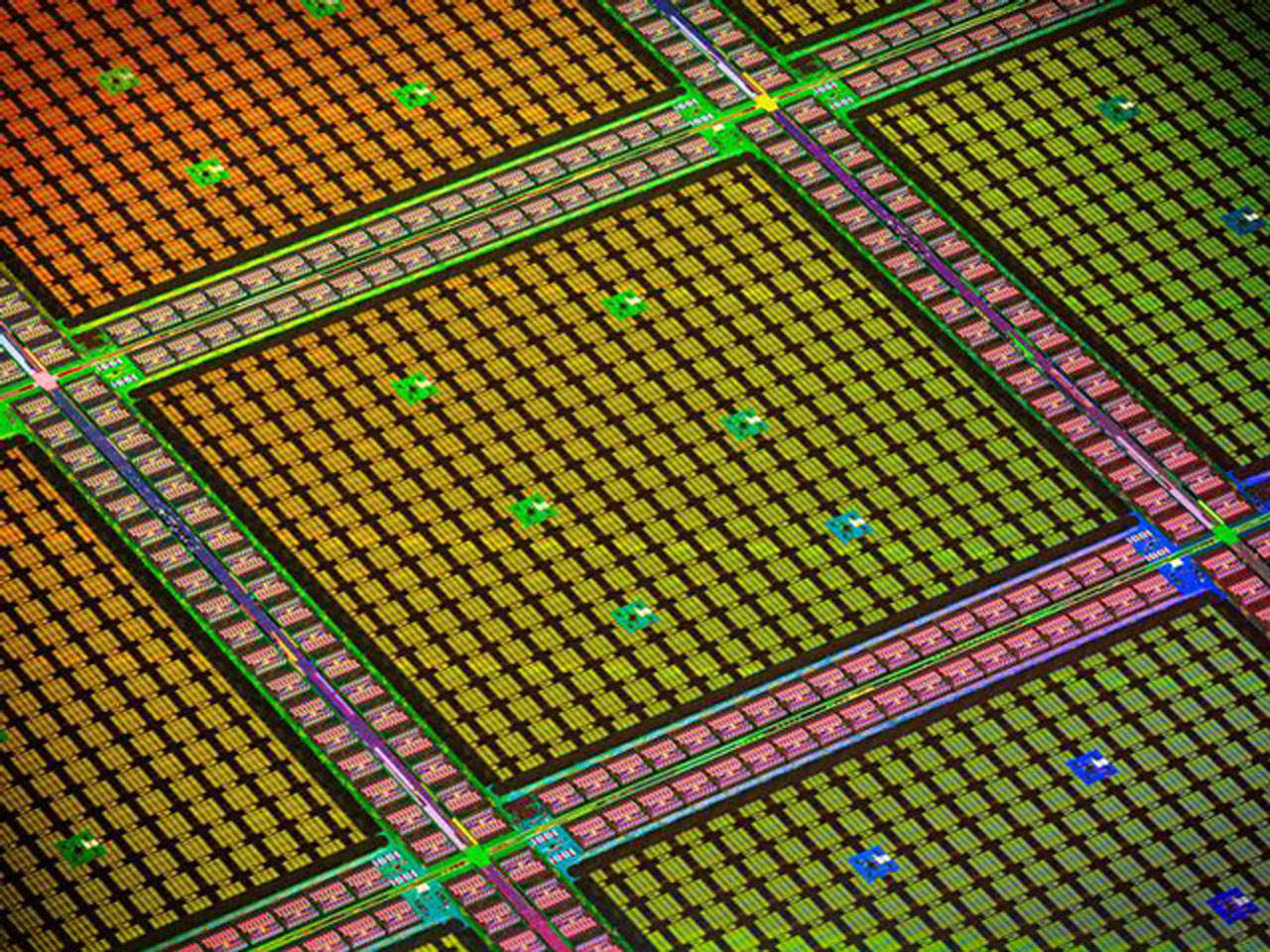
FSD 晶片
打造運作於全自動駕駛軟件的 AI 推理晶片,研究改進每個小型和微型的工程結構,同時努力提升矽晶片的最大瓦性能。晶片設計涉及平面規劃、時間和功率分析。撰寫可靠的測試報告和計分方法,來驗證晶片的功能和性能。安裝驅動器以進行編程及與晶片通訊,並專注於性能和冗餘優化。驗證矽晶片後,將其投入車輛中大量生產。

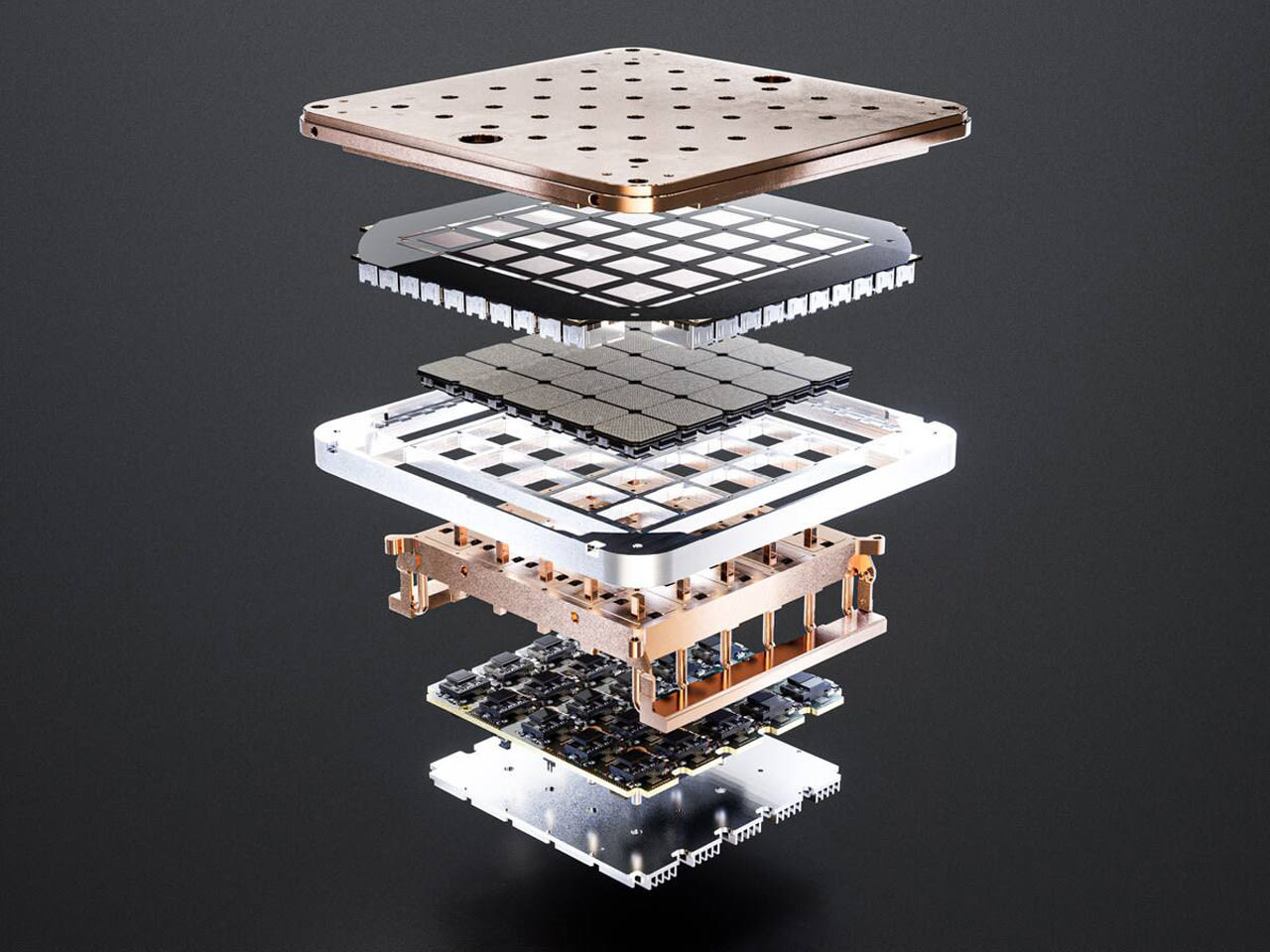
Dojo 晶片
打造應用於 Dojo 系統的 AI 訓練晶片。從最小的訓練節點到多模訓練板塊,均運用最先進的技術,以使每一個細節都達至最佳性能、吐量及頻寬。晶片平面規劃以及其他物理層面均嚴格遵守物理方法。開發矽前驗證和矽後驗證方法,以確保運作正常。撰寫編譯器及驅動程式,以優化整個 Dojo 系統中神經網絡的功能及性能。有關 Dojo 算術格式和方法的詳情,請下載我們最新的白皮書。
Dojo 系統
設計及建立 Dojo 系統,包括矽韌體介面以至控制韌體的高級軟件 API。透過最先進的技術解決大功率輸出及冷卻的難題,並撰寫控制循環及可縮放的監控軟件。系統設計涉及多個方面。機械、熱力和電氣工程團隊共同合作,打造新一代機器學習計算能力供 Tesla 資料中心使用。與 Tesla 車隊合作,使用強大的資料集部署訓練工作負載,設計面向公眾的API,將 Dojo 推向大眾。
神經網絡
應用最先進的研究技術,訓練深層神經網絡處理處理從知覺到操控層面的問題。我們的每個攝影機網絡,均透過分析原始影像,進行語義分割、物體檢測和單像景物深度估測。我們的鳥瞰網絡可從所有攝影機中擷取影像,直接輸出俯覽圖,顯示道路分佈、靜態建築物和 3D 物件。我們的網絡會從現實世界裡的多種複雜情況中學習,並反覆擷取來自數百萬部車輛的即時資料。完整的 Autopilot 自動輔助駕駛神經網絡約包含 48 個網絡,需要 70,000 個 GPU 小時訓練 🔥,每個時段可輸出 1,000 組不同的張量(預測量)。
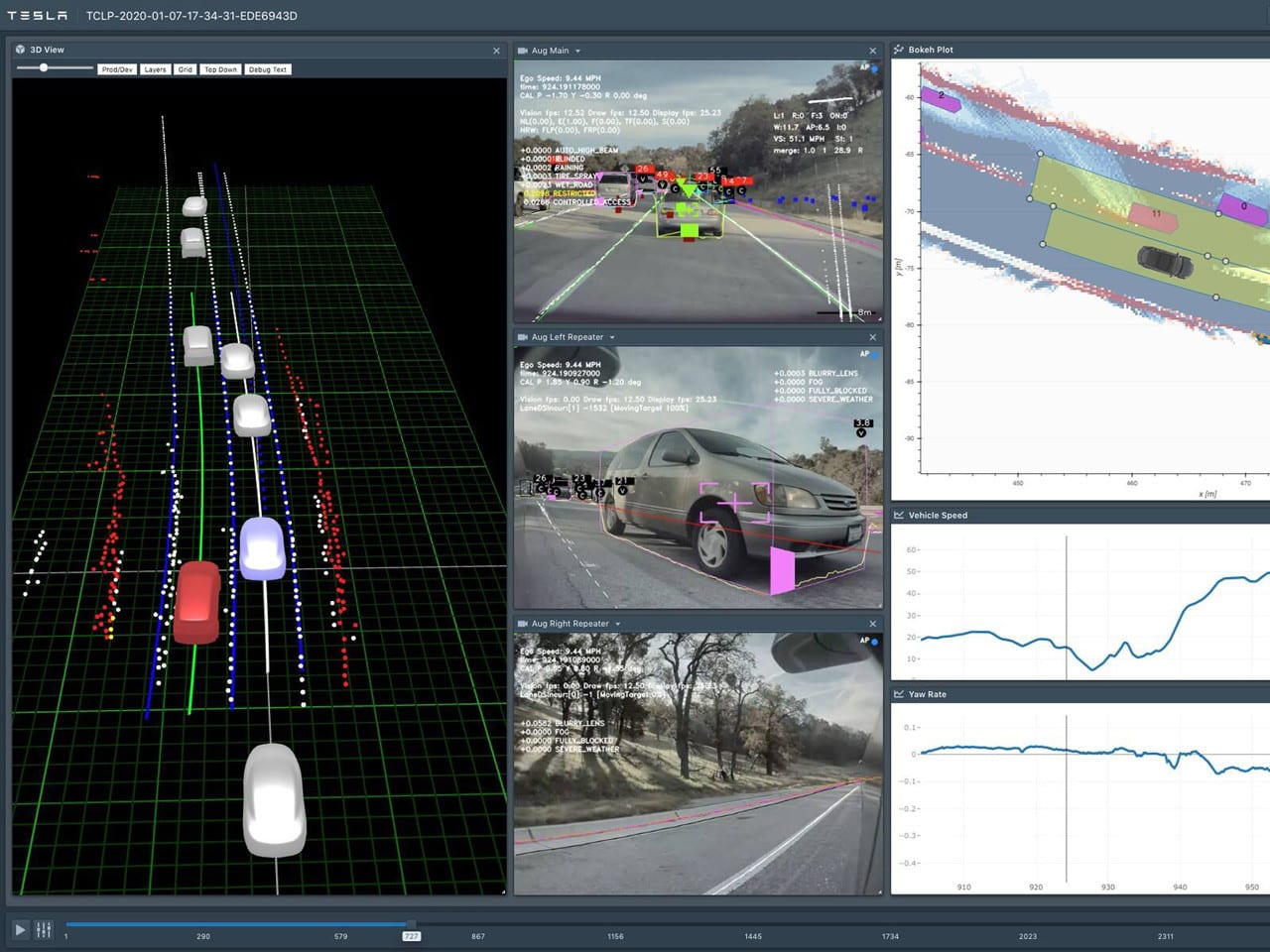
自動駕駛演算法
透過模擬現實世界建構高像真度的圖像或資料,規劃該空間的軌跡,開發能夠駕駛車輛的核心演算法。為了訓練神經網絡來對這些圖像或資料進行預測,系統結合來自不同時間、地點由車輛感測器收集的資料,運用演算法建立準確、大規模的地面真實資料庫。使用最先進的技術,建立強大的規劃和決策系統,在不確定的複雜現實情況中運作。用 Tesla 整個車隊規模的資料,來評估你的車輛所使用的演算法。
基礎程式碼
流量、誤差、正確程度和確定性是我們優化程式碼的主要指標。由基礎起逐步搭建 Autopilot 自動輔助駕駛軟件,緊密整合定制硬件。安裝強勁的啟動程式,用以支援無線軟件更新及定制的 Linux 核心系統。編寫快速且節省存儲空間的底層程式碼,以從車隊的感測器中擷取高頻、大量的資料,分享至多個使用者程序,而不會對中央記憶體存取造成延誤或出現 CPU 週期中缺失關鍵功能程式碼的情況。各種硬件的處理單元使用擠壓和管線運算,分佈在多個晶片系統 (SoC) 上。

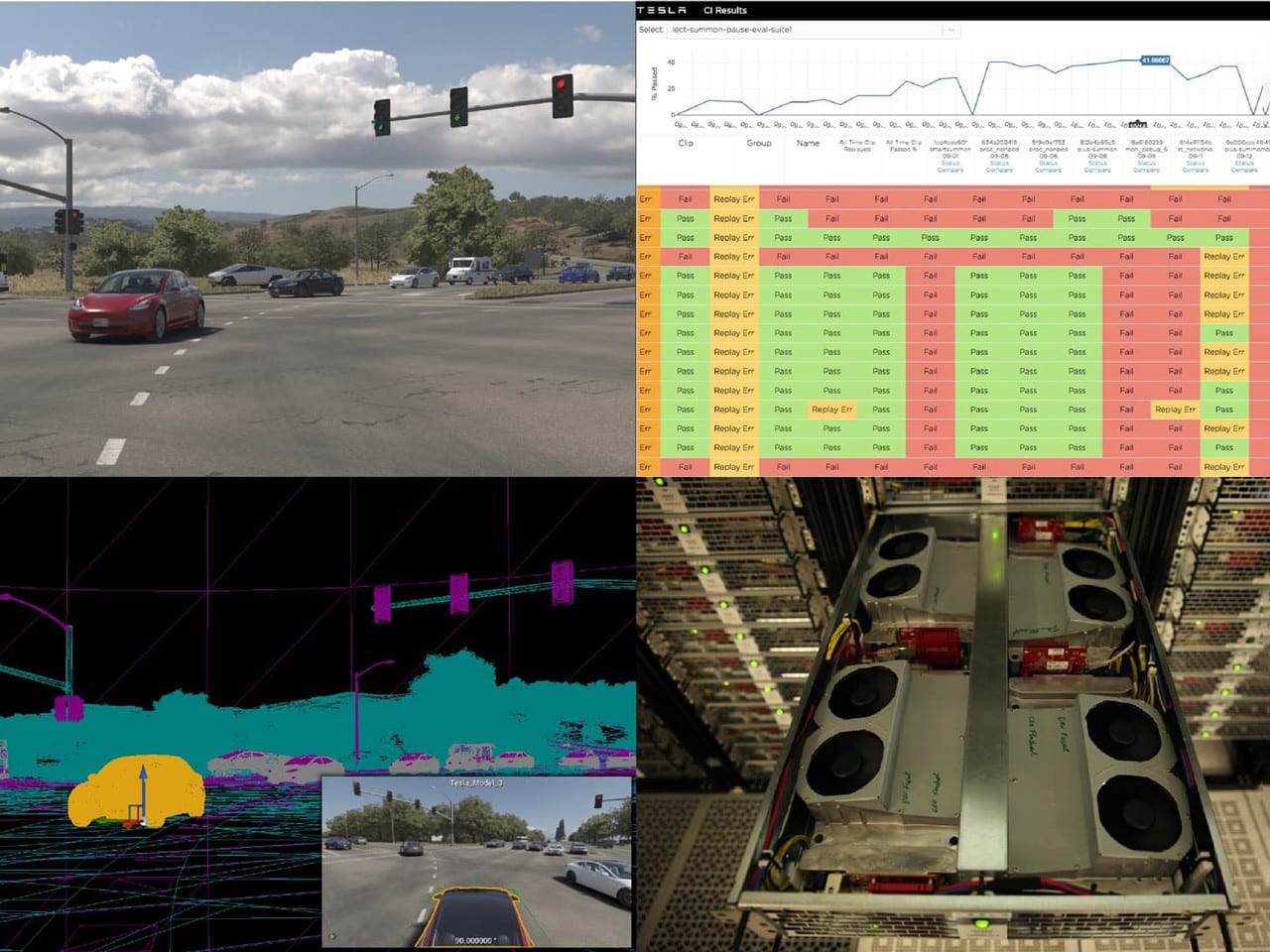
基礎架構評估
大規模建立開環和閉環的硬件在環 (HiL) 評估工具和基礎架構,以加速創新步伐、追踪效能改進,及預防回歸 (regression)。利用車隊的匿名影片,將之整合到大型測試套件內。撰寫模擬真實環境的程式碼,輸出高像真度的圖像和其他感測器資料,並傳送給 Autopilot 自動輔助駕駛軟件,進行即時除錯或自動化測試。