AI และหุ่นยนต์
เราพัฒนาและปรับใช้ระบบอัตโนมัติในวงกว้างกับรถ หุ่นยนต์ และอื่น ๆ เราเชื่อว่าแนวทางที่ใช้ AI ขั้นสูงสำหรับการมองเห็นและการวางแผนที่รองรับโดยการใช้ฮาร์ดแวร์การอนุมานอย่างมีประสิทธิภาพเป็นวิธีเดียวที่จะบรรลุโซลูชันโดยทั่วไปสำหรับการขับอัตโนมัติเต็มรูปแบบ หุ่นยนต์สองขา และอื่น ๆ
Tesla Optimus
สร้างหุ่นยนต์ที่คล้ายมนุษย์ทำงานด้วยระบบอัตโนมัต มีสองขา ใช้งานสำหรับวัตถุประสงค์ทั่วไปที่สามารถปฏิบัติงานที่ไม่ปลอดภัย ซ้ำ ๆ หรือน่าเบื่อได้ การบรรลุเป้าหมายจำเป็นต้องสร้างชุดซอฟต์แวร์ที่ช่วยให้เกิดความสมดุล การนำทาง การรับรู้ และการโต้ตอบกับโลกจริง เรากำลังจ้างวิศวกรการเรียนรู้เชิงลึก คอมพิวเตอร์วิทัศน์ การวางแผนการเคลื่อนไหว การควบคุม วิศวกรเครื่องกลและซอฟต์แวร์ทั่วไป เพื่อแก้ปัญหาความท้าทายด้านวิศวกรรมที่ยากที่สุดบางอย่างของเรา

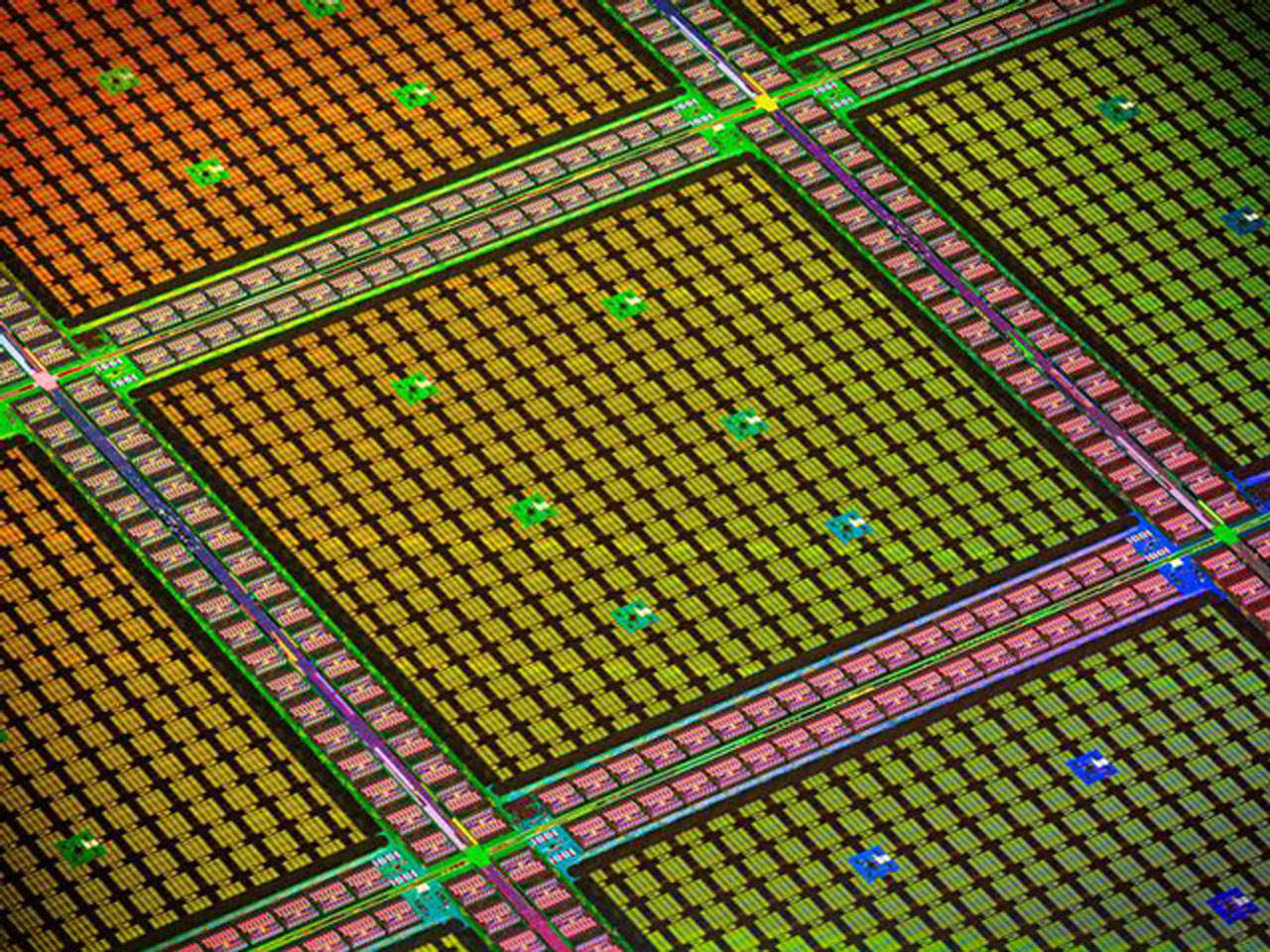
ชิป FSD
สร้างชิปการอนุมานของ AI เพื่อรันซอฟต์แวร์การขับอัตโนมัติเต็มรูปแบบของเรา โดยพิจารณาจากการปรับปรุงสถาปัตยกรรมขนาดเล็กและสถาปัตยกรรมไมโครทั้งหมด ในขณะที่บีบอัดประสิทธิภาพของชิพซิลิคอนสูงสุดต่อวัตต์ไปด้วยในเวลาเดียวกัน ดำเนินการวิเคราะห์แผนผังชั้น เวลา และกำลังในการออกแบบ เขียนการทดสอบและป้ายคะแนนที่มีประสิทธิภาพเพื่อตรวจสอบการทำงานและประสิทธิภาพ ปรับใช้ไดรเวอร์เพื่อตั้งโปรแกรมและสื่อสารกับชิป โดยมุ่งเน้นไปที่การเพิ่มประสิทธิภาพและความซ้ำซ้อน และสุดท้าย ทดสอบสอบชิปซิลิคอนและนำไปผลิตเป็นจำนวนมากเพื่อใช้ในรถยนต์ของเรา

ชิป Dojo
สร้างชิปฝึก AI เพื่อขับเคลื่อนระบบ Dojo ของเรา นำเทคโนโลยีที่ล้ำสมัยมาปรับใช้ตั้งแต่กับโหนดการฝึกที่เล็กที่สุดไปจนถึงไทล์การฝึกแบบ Multi-Die ออกแบบและสร้างเพื่อให้ได้ประสิทธิภาพ อัตราความเร็วและแบนด์วิดท์สูงสุดในทุกรายละเอียด กำหนดวิธีการทางกายภาพ การวางผังพื้น และลักษณะทางกายภาพอื่น ๆ ของชิป พัฒนาวิธีการตรวจสอบก่อนซิลิคอนและการตรวจสอบความถูกต้องภายหลังซิลิคอนเพื่อให้แน่ใจว่ามีความถูกต้องในการทำงาน เขียนคอมไพเลอร์และไดรเวอร์เพื่อเพิ่มประสิทธิภาพพลังงานและประสิทธิภาพสำหรับโครงข่ายประสาทของเราทั่วทั้งระบบ Dojo หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับรูปแบบและวิธีการคำนวณของ Dojo โปรดดาวน์โหลดเอกสารทางเทคนิคล่าสุดของเรา
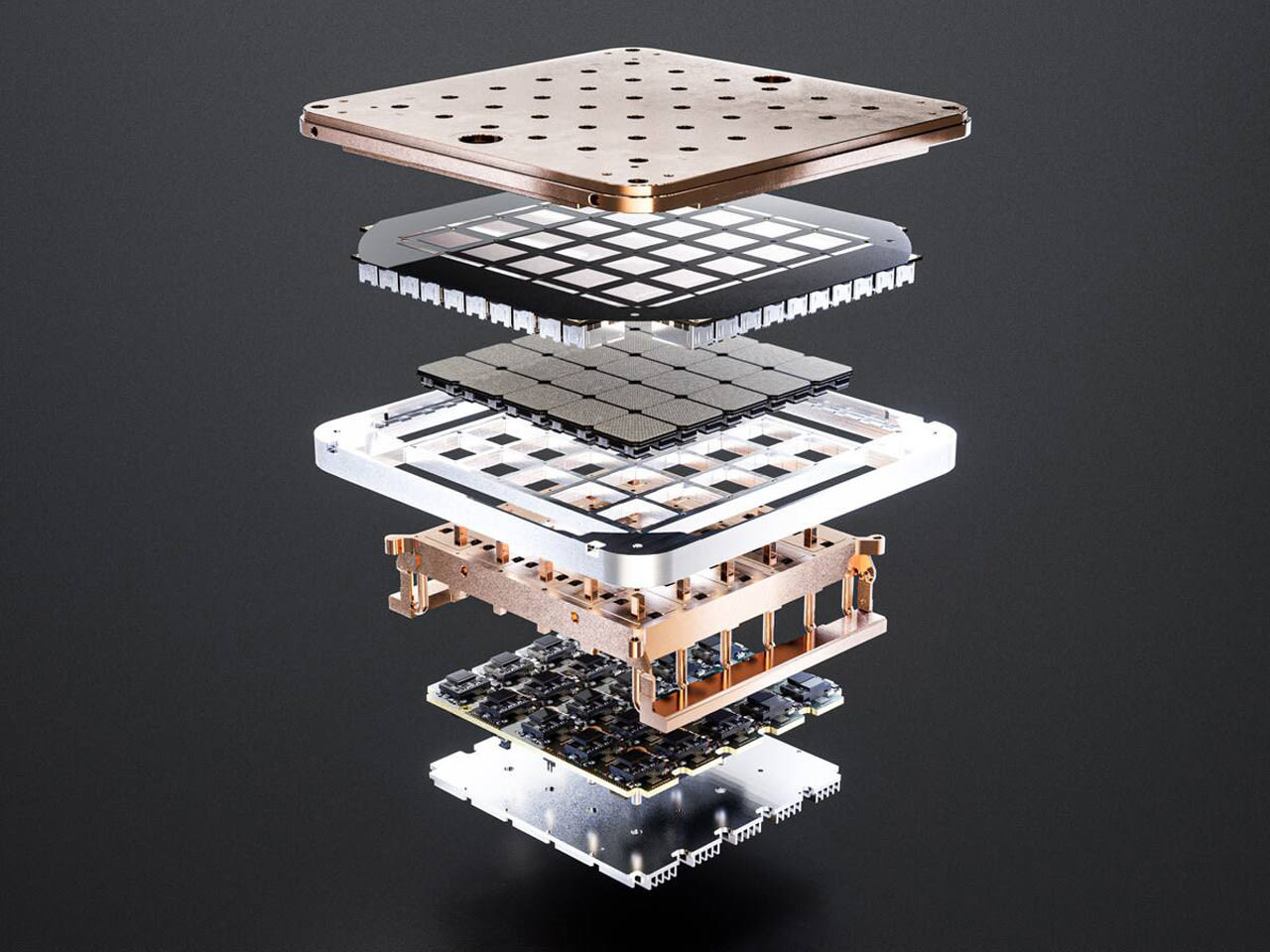
ระบบ Dojo
ออกแบบและสร้างระบบ Dojo ตั้งแต่อินเทอร์เฟซเฟิร์มแวร์ซิลิคอนไปจนถึงซอฟต์แวร์ API ระดับสูงที่ใช้ควบคุมระบบ แก้ไขปัญหาที่ยากด้วยเทคโนโลยีล้ำสมัยสำหรับการส่งมอบและการระบายความร้อนกำลังสูง และเขียนการควบคุมแบบวนซ้ำและซอฟต์แวร์ตรวจสอบที่พัฒนาได้ ทำงานกับทุกแง่มุมของการออกแบบระบบโดยที่ข้อจำกัดเดียวคือจินตนาการของคุณ โดยใช้ความสามารถอย่างเต็มที่ของทีมวิศวกรรมเครื่องกล ความร้อนและไฟฟ้าของเราเพื่อสร้างการประมวลผลการเรียนรู้ของเครื่องคอมพิวเตอร์รุ่นต่อไปสำหรับการใช้ในศูนย์ข้อมูลของ Tesla ร่วมมือกับ Fleet Learning ของ Tesla เพื่อปรับใช้เวิร์กโหลดการฝึกโดยใช้ชุดข้อมูลขนาดใหญ่ของเรา และออกแบบ API สาธารณะที่จะนำ Dojo ไปสู่มวลชน
โครงข่ายประสาทเทียม
ใช้การวิจัยที่ล้ำสมัยเพื่อฝึกโครงข่ายประสาทเชิงลึกเกี่ยวกับเรื่องปัญหาต่างๆ ตั้งแต่การรับรู้ไปจนถึงการควบคุม เครือข่ายกล้องของเราวิเคราะห์ภาพดิบเพื่อทำการแบ่งส่วนความหมาย การตรวจจับวัตถุ และการประเมินความลึก เครือข่ายมุมมองมุมสูงของเราถ่ายวิดีโอจากกล้องทั้งหมดเพื่อส่งออกแผนผังถนน โครงสร้างพื้นฐานแบบคงที่ และวัตถุ 3 มิติโดยตรงในมุมมองจากบนลงล่าง เครือข่ายของเราเรียนรู้จากสถานการณ์ที่ซับซ้อนและหลากหลายที่สุดในโลก ซึ่งได้รับสถานการณ์ดังกล่าวซ้ำแล้วซ้ำเล่าจากขบวนรถนับล้านของเราในแบบเรียลไทม์ โครงข่ายประสาทแบบ Autopilot ที่สมบูรณ์ต้องใช้ 48 เครือข่ายที่ใช้เวลา 70,000 GPU ชั่วโมงในการฝึก 🔥 เมื่อใช้ร่วมกัน โครงข่ายจะแสดงผลเทนเซอร์ (การคาดการณ์) ที่แตกต่างกัน 1,000 แบบในแต่ละขั้นตอน
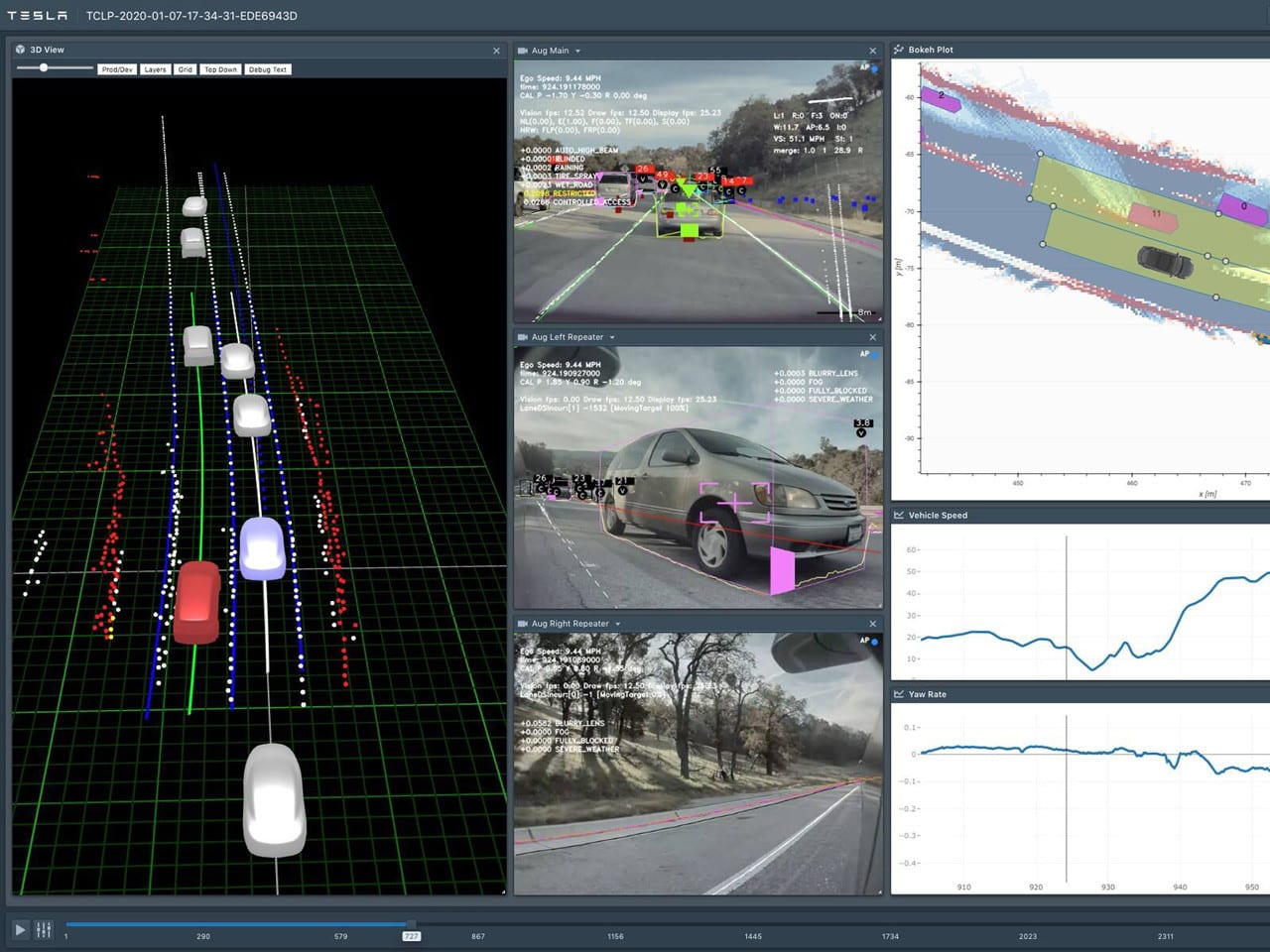
อัลกอริทึมอิสระ
พัฒนาอัลกอริทึมหลักที่ขับเคลื่อนรถด้วยการสร้างภาพจำลองของโลกที่มีความเที่ยงตรงสูงและวางแผนเส้นทางในพื้นที่นั้น เพื่อที่จะฝึกให้โครงข่ายประสาทคาดการณ์ภาพจำลองดังกล่าว อัลกอริทึมจึงสร้างข้อมูลจริงจากภาคพื้นดินที่มีความแม่นยำและมีขนาดใหญ่โดยการรวมข้อมูลจากเซ็นเซอร์ของรถในพื้นที่ตลอดเวลา ใช้เทคนิคที่ล้ำสมัยเพื่อสร้างระบบการวางแผนและการตัดสินใจที่มีประสิทธิภาพซึ่งจะทำงานในสถานการณ์จริงที่ซับซ้อนภายใต้ความไม่แน่นอน ประเมินอัลกอริทึมของคุณในระดับของกลุ่มรถทั้งหมดของ Tesla
พื้นฐานของโค้ด
อัตราความเร็ว การหน่วง ความถูกต้อง และการกำหนดเป็นตัวชี้วัดหลักที่เราใช้เพิ่มประสิทธิภาพโค้ดของเรา สร้างพื้นฐานซอฟต์แวร์ Autopilot ขึ้นจากระดับต่ำสุดของสแต็ก โดยผสานรวมกับฮาร์ดแวร์ที่กำหนดเองของเราอย่างแน่นหนา ปรับใช้ Bootloader ที่ไว้วางใจได้สูงด้วยส่วนสนับสนุนสำหรับการอัปเดตแบบ Over The Air และเปิดลินุกซ์ เคอร์เนลที่กำหนดเอง เขียนโค้ดระดับต่ำที่เร็วและไม่ใช้หน่วยความจำเยอะเพื่อเก็บข้อมูลที่มีความถี่สูงและมีปริมาณมากจากเซ็นเซอร์ของเรา และเพื่อแบ่งปันกับกระบวนการของผู้บริโภคหลายๆ กระบวนการโดยไม่กระทบต่อการหน่วงในการเข้าถึงหน่วยความจำส่วนกลางหรือไม่ทำให้โค้ดการทำงานที่สำคัญจากวงจร CPU หยุดชะงัก บีบอัดและประมวลผลแบบไปป์ไลน์ผ่านหน่วยประมวลผลฮาร์ดแวร์ที่หลากหลาย กระจายไปตามระบบบนชิปหลายตัว

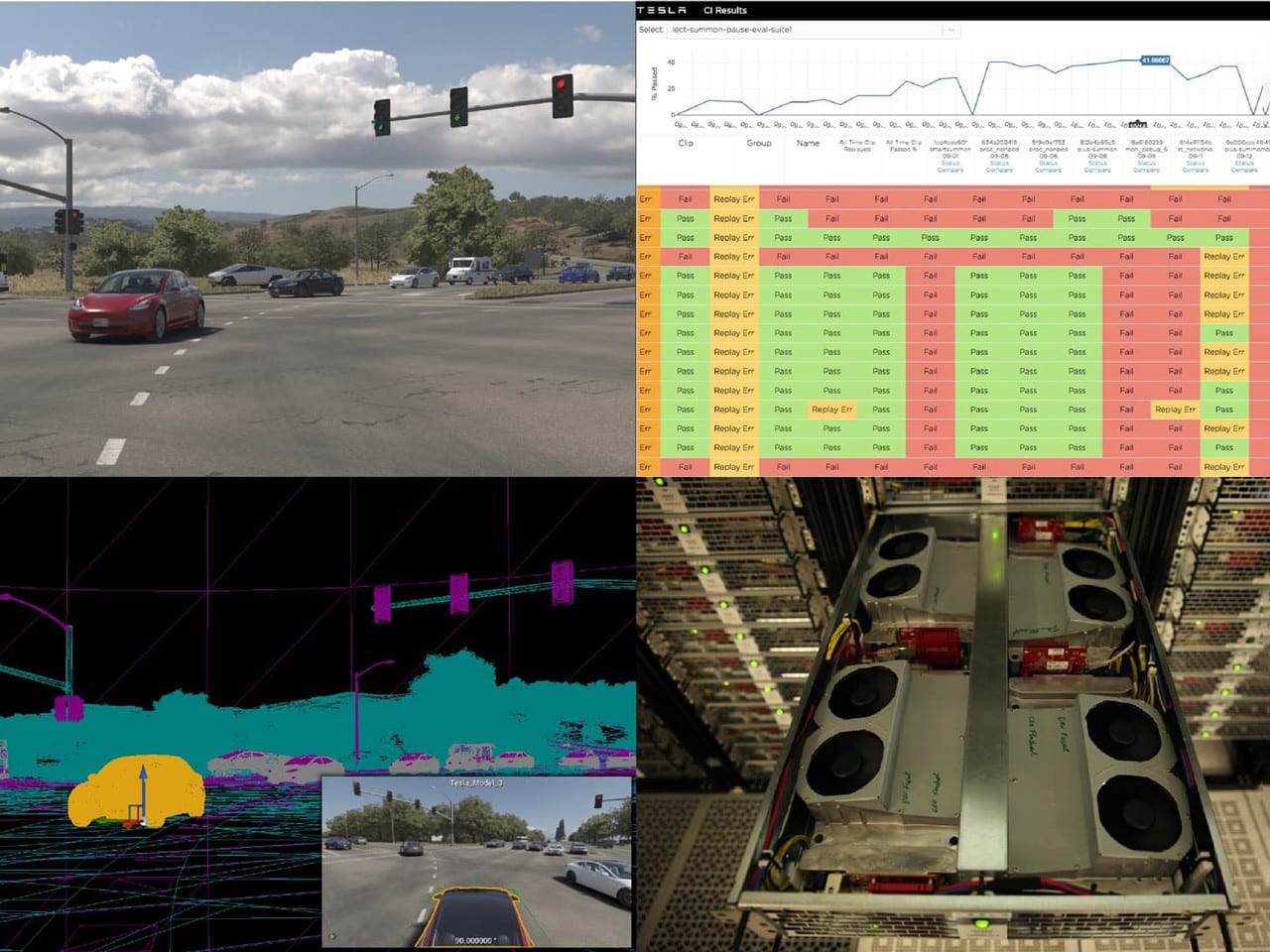
โครงสร้างพื้นฐานการประเมินผล
สร้างเครื่องมือการประเมินและโครงสร้างพื้นฐานการจำลองฮาร์ดแวร์แบบวนซ้ำที่เป็นแบบเปิดและแบบปิดในวงกว้าง เพื่อเร่งความเร็วของนวัตกรรม ติดตามการปรับปรุงประสิทธิภาพ และป้องกันการถดถอย ใช้ประโยชน์จากคลิปลักษณะเฉพาะที่ไม่เปิดเผยชื่อจากขบวนรถของเราและผสานเข้ากับชุดกรณีทดสอบขนาดใหญ่ เขียนโค้ดที่จำลองสภาพแวดล้อมของโลกจริง สร้างกราฟิกที่สมจริงอย่างมาก และข้อมูลเซ็นเซอร์อื่นๆ ที่ป้อนซอฟต์แวร์ Autopilot ของเราสำหรับการดีบักแบบสดหรือการทดสอบอัตโนมัติ