AI och robotteknik
Vi utvecklar och använder autonomi i stor omfattning i fordon, robotar och andra områden. Vi tror att ett tillvägagångssätt som baseras på avancerad AI för vision och planering som stöds av effektiv användning av hårdvara för slutledning är det enda sättet att nå en allmän lösning för total självkörning, tvåfotad robotteknik och fler användningsområden.
Tesla Optimus
Skapa en autonom tvåfotad människoformad robot för allmänna ändamål som kan utföra osäkra, repetitiva eller tråkiga uppgifter. För att uppnå detta mål krävs att man bygger programvarustackar som möjliggör balans, navigering, uppfattningsförmåga och interaktion med den fysiska världen. Vi anställer ingenjörer inom djup maskininlärning, datorseende, rörelseplanering, styrning, mekanik och systemutvecklare för att lösa några av våra svåraste tekniska utmaningar.

FSD-chip
Bygg AI-inferenschips för att köra vår programvara för total självkörning med varje liten förbättring av arkitekturen och mikroarkitekturen i åtanke samtidigt som du maximerar prestandan per watt. Utför arbetsplanering, tids- och strömanalyser för utformningen. Skriv robusta tester och resultattavlor för att verifiera funktionalitet och prestanda. Implementera drivrutiner för att programmera och kommunicera med chippet, med fokus på prestandaoptimering och redundans. Validera slutligen kiselchippet och ta det till massproduktion i våra fordon.

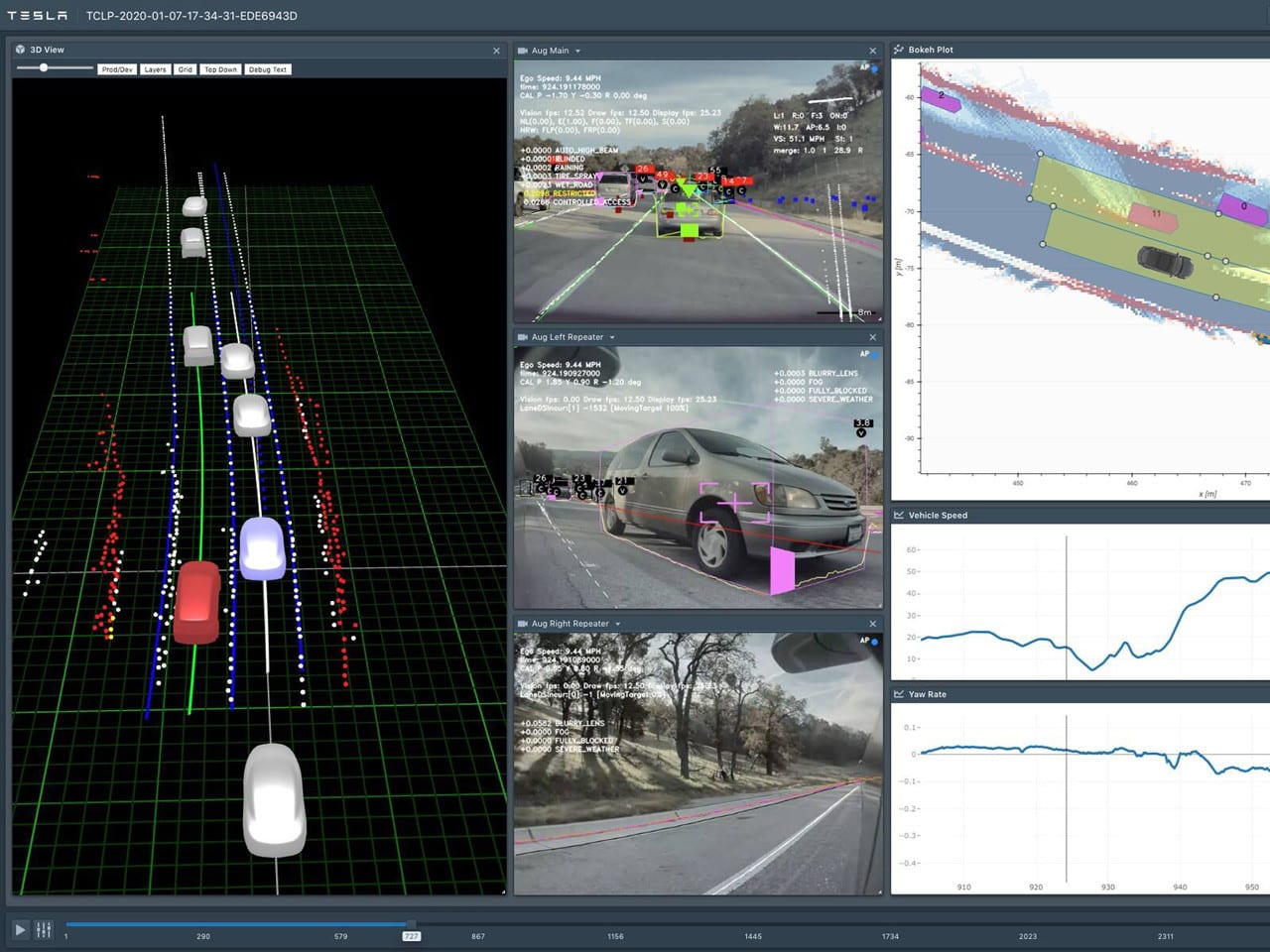
Neurala nätverk
Applicera avancerad forskning för att utbilda djupa neurala nätverk om problem inom allt från perception till styrning. Våra per-kamera-nätverk analyserar råa bilder för att utföra semantisk segmentering, objektdetektering och monokulär djupberäkning. Våra översiktsnätverk hämtar in video från alla kameror för att ta fram vägens layout, den statiska infrastrukturen och 3D-objekten direkt i vy uppifrån. Våra nätverk lär sig utifrån de mest komplicerade och mångsidiga scenarierna i världen, iterativt inhämtat från vår fordonsflotta med miljontals bilar i realtid. En fullständig version av neurala nätverk för Autopilot innefattar 48 nätverk som tar 70 000 GPU-timmar att träna upp 🔥. Tillsammans producerar de 1000 olika tensorer (förutsägelser) vid varje tidpunkt.
Autonomitetsalgoritmer
Utveckla de grundläggande algoritmer som driver fordonet genom att skapa en hi-fi-representation av världen och planera vägar i detta utrymme. I syfte att träna de neurala nätverken att förutsäga sådana representationer kan de algoritmiskt skapa korrekta och storskaliga marksanningsdata genom att kombinera information från fordonets sensorer över tid och rum. Använd toppmodern teknik för att bygga ett robust system för planering och beslutsfattande som fungerar i komplicerade verkliga situationer med osäkerhet. Utvärdera dina algoritmer i förhållande till hela Teslas vagnpark.
Grundläggande kod
Genomströmning, latens, korrekthet och determinism är de viktigaste mätvärdena för optimering av vår kod. Bygg upp den programvarumässiga grunden för Autopilot från de lägsta nivåerna i stacken och integrera strikt med vår anpassade hårdvara. Implementera oerhört pålitliga uppstartsrutiner med stöd för trådlösa uppdateringar och ta fram anpassade Linux-kärnor. Skriv snabb, minneseffektiv kod på grundläggande nivå för att ta emot stora volymer högupplöst data från våra sensorer och dela med sig av den med till flera konsumentprocesser, utan att påverka latensen för den centrala minnesåtkomst eller svälta ut kritisk funktionskod från processorns cykler. Gör krympnings- och pipelineberäkningar för olika typer av bearbetningsenheter i hårdvaran som är fördelade över flera system-på-chip.

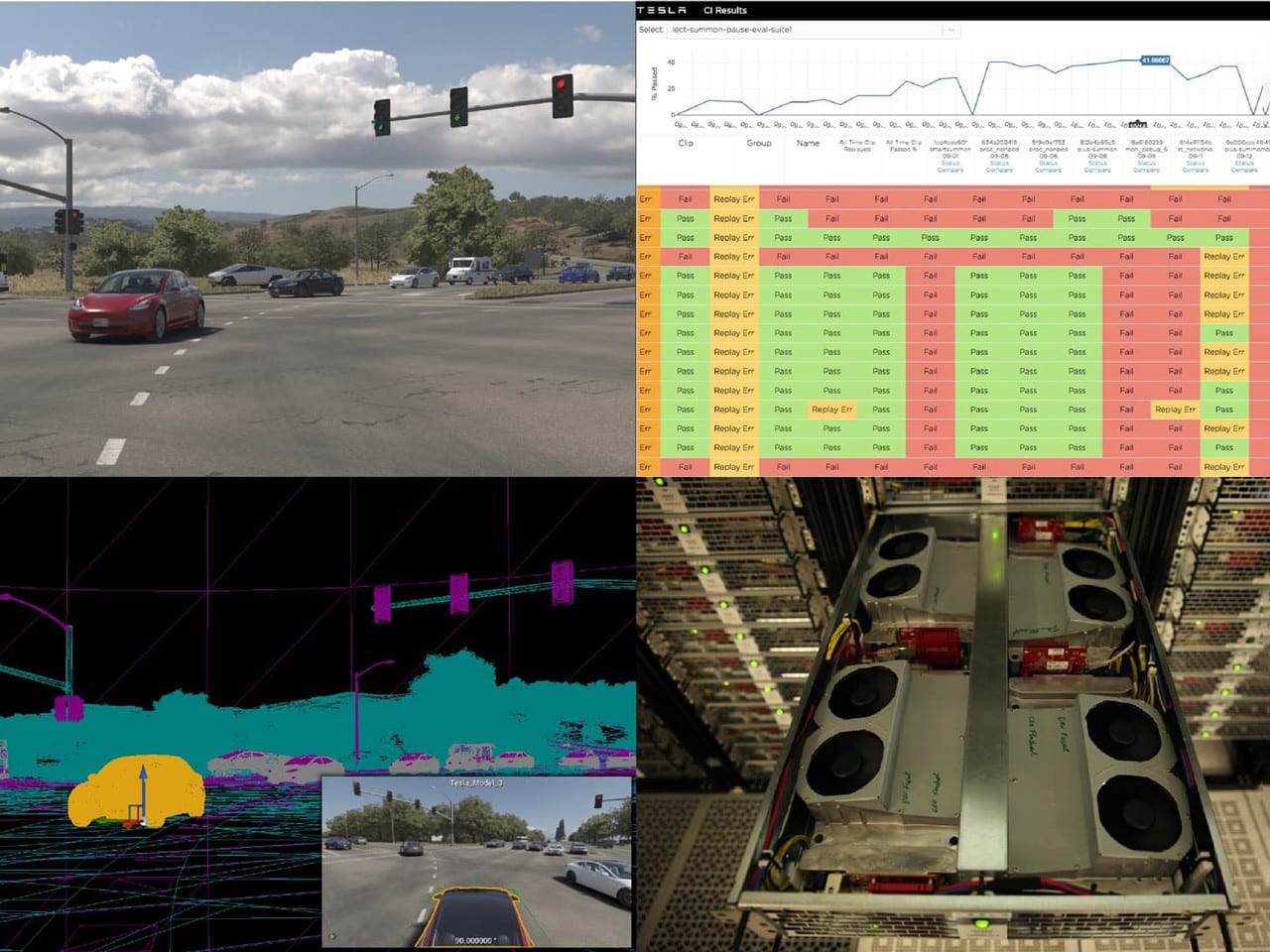
Utvärderingsinfrastruktur
Bygg upp utvärderingsverktyg i öppna och slutna kretsar med hårdvara i kretsen samt omfattande infrastruktur i stor skala för att öka innovationstakten, spåra prestandaförbättringar och förhindra återgångar. Använd anonymiserade karaktäristiska klipp från vår vagnpark och integrera dem i stora sviter av testfall. Skriv kod som simulerar vår verkliga miljö och producerar mycket realistisk grafik och andra sensordata som matas in i vår programvara för Autopilot för direkt avbuggning eller automatisk testning.
Bygg framtiden för artificiell intelligens
Tesla kommer att använda informationen i detta formulär för att behandla din förfrågan i enlighet med integritetspolicyn för Tesla Talent.