AI en robotica
Wij ontwikkelen en implementeren op grote schaal autonome functies in onder andere voertuigen en robots. Wij zijn ervan overtuigd dat een aanpak gebaseerd op geavanceerde AI voor visie en planning, ondersteund door efficiënt gebruik van inferentie-hardware, de enige manier is om tot een algemene oplossing te komen voor Full Self-Driving, robots die op twee benen lopen en meer.
Tesla Bot
Een autonome mensachtige robot met twee benen creëren die in staat is om onveilige, repetitieve of saaie taken uit te voeren. Om dat te bereiken moeten softwarestacks worden gebouwd die balans, navigatie, perceptie en interactie met de fysieke wereld mogelijk maken. Wij nemen ingenieurs gespecialiseerd in Deep Learning, computervisie, bewegingsplanning, bedieningselementen en mechanische en algemene software in dienst om enkele van onze moeilijkste technische uitdagingen op te lossen.

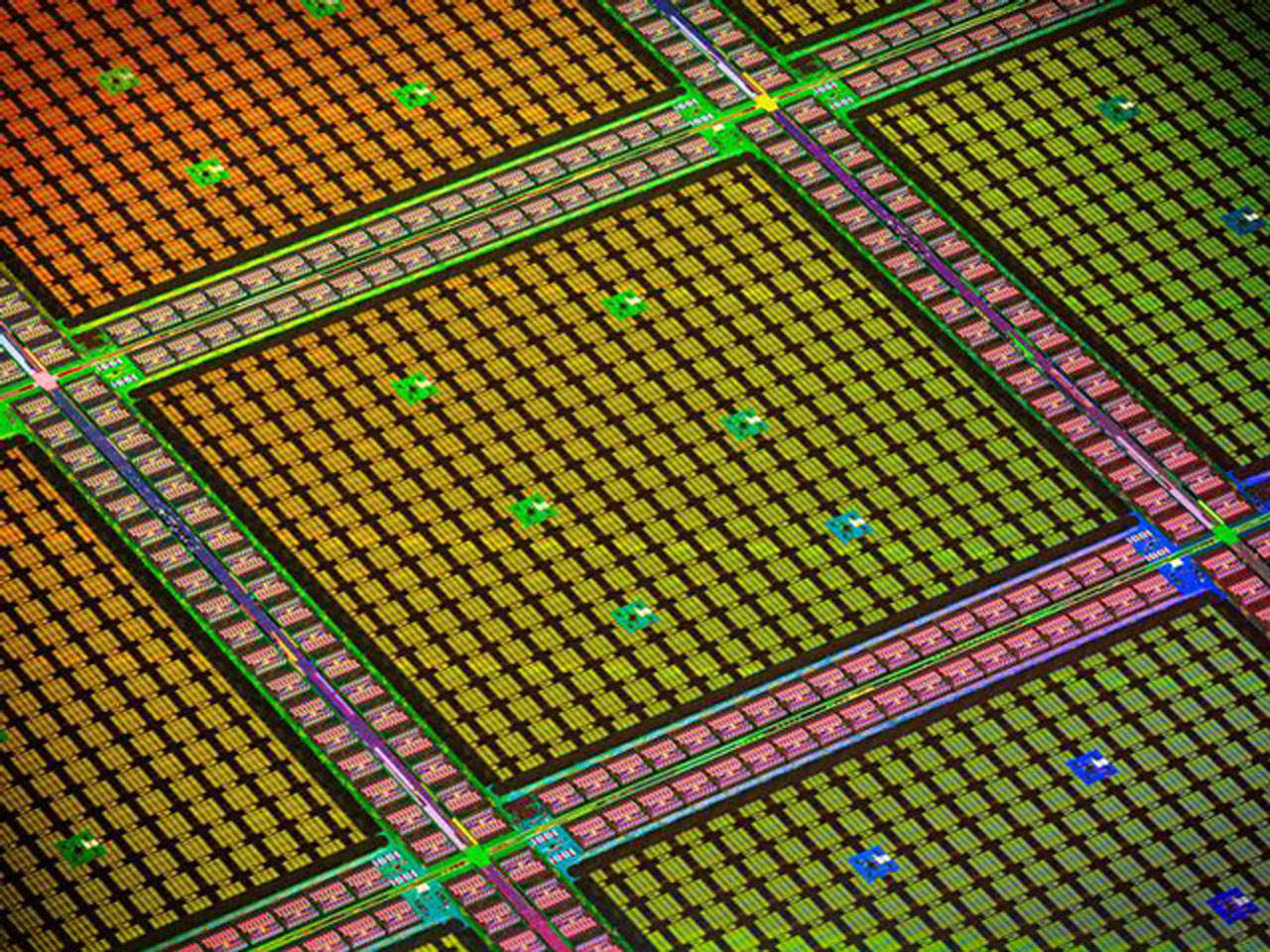
FSD-chip
Bouw AI-proceschips die onze Full Self-Driving-software ondersteunen en denk ook aan kleine of zeer kleine bouwkundige verbeteringen die de prestaties per watt van silicium kunnen maximaliseren. Voer grootte-, tijd- en vermogensanalyses uit op het ontwerp. Schrijf robuuste testprocedures en scoreborden om werking en prestaties te controleren. Implementeer stuurprogramma's om de chip te programmeren en ermee te communiceren en leg daarbij de nadruk op prestatieoptimalisatie en redundantie. Valideer ten slotte de siliciumchip en zorg ervoor dat deze in massa kan worden geproduceerd voor onze voertuigen.

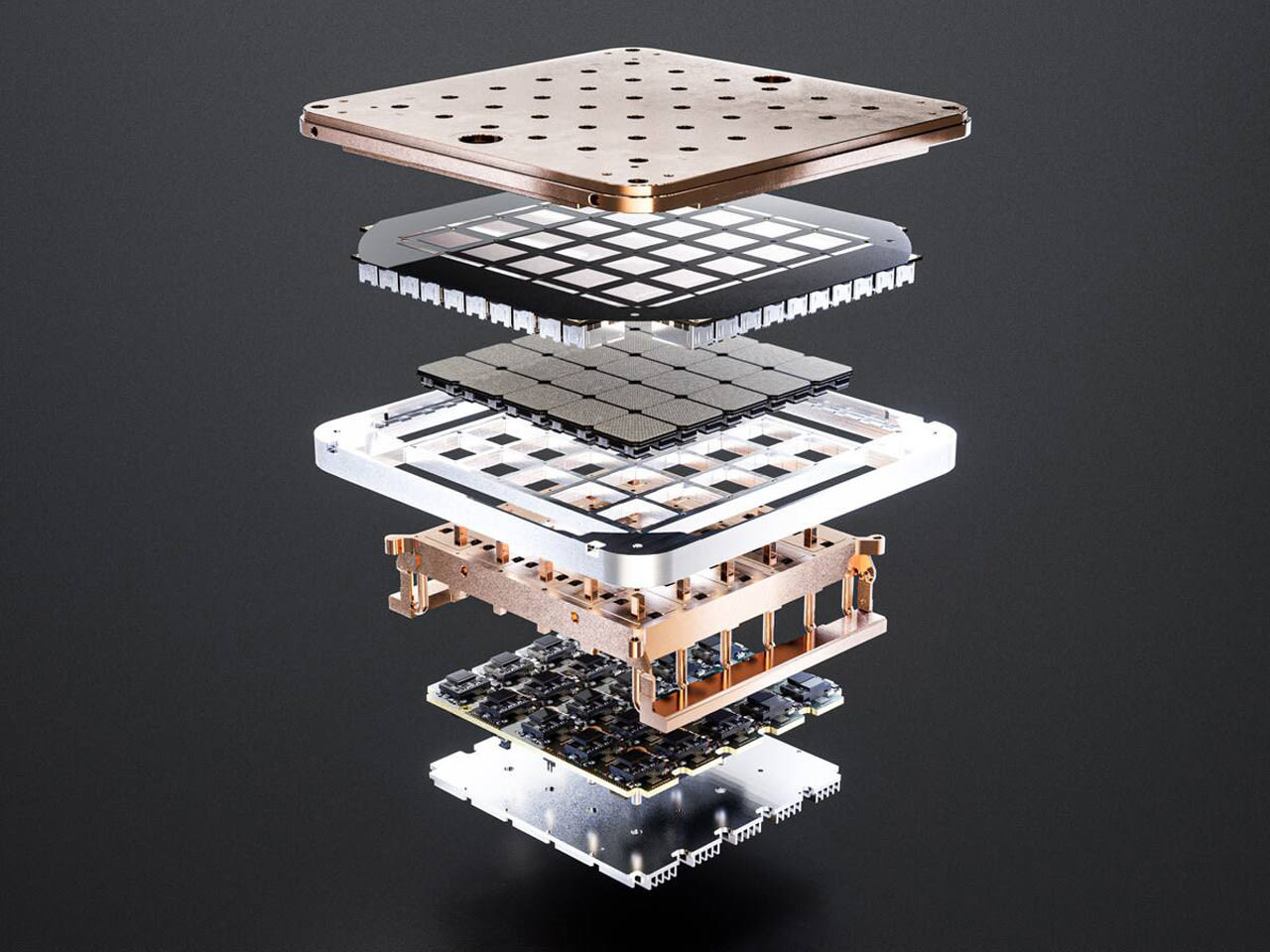
Dojo-chip
Bouw AI-trainingschips voor ons Dojo-systeem. Implementeer de allernieuwste technologie, van de kleinste trainingsnodes tot de multi-die trainingstegels. Ontwerp en bouw en streef daarbij naar maximale prestaties, verwerkingscapaciteit en bandbreedte bij elke granulariteit. Bepaal de fysieke methodologie, de grootte en andere fysieke aspecten van de chip. Ontwikkel virtuele verificatiemethoden en validatiemethoden voor fysieke producten om correct functioneren te garanderen. Schrijf compilers en stuurprogramma's om de kracht en prestaties van onze neurale netwerken in het hele Dojo-systeem te optimaliseren. Download ons nieuwste witboek voor meer informatie over de rekenkundige indelingen en methoden van Dojo.
Dojo-systeem
Ontwerp en bouw het Dojo-systeem, van de fysieke firmware-interfaces tot de geavanceerde software-API's waarmee het systeem wordt aangestuurd. Los moeilijke problemen op met de modernste technologie voor hoge prestaties en optimale koeling. Schrijf regelkringen en bewakingssoftware die op elke schaal kunnen worden ingezet. Werk met elk aspect van systeemontwerp met alleen uw verbeeldingskracht als limiet door gebruik te maken van de volledige expertise van onze mechanische, thermische en elektrische engineering-teams om de volgende generatie machine learning te creëren voor gebruik in datacentra van Tesla. Gebruik het Tesla-wagenpark en leer om trainingsworkloads in te zetten met behulp van onze enorme datasets, en ontwerp een openbare API die Dojo voor iedereen bereikbaar maakt.
Neurale netwerken
Voer baanbrekend onderzoek uit om diepe neurale netwerken te trainen op problemen variërend van waarneming tot besturing. Onze cameragestuurde netwerken analyseren onbewerkte beelden om semantische segmentatie, objectdetectie en monoculaire diepteschatting uit te voeren. Onze vogelperspectiefnetwerken gebruiken videobeelden van alle camera's om de indeling van de weg, de statische infrastructuur en 3D-objecten direct naar de weergave van het vogelperspectief over te brengen. Onze netwerken leren van de meest gecompliceerde en diverse scenario's ter wereld, die op iteratieve wijze en in real time worden ontleend aan miljoenen rijdende Tesla's. Een volledig uitgebouwd neuraal Autopilot-netwerk omvat 48 netwerken die 70.000 GPU-uren nodig hebben om getraind te worden 🔥. Samen voeren ze 1.000 verschillende tensoren (voorspellingen) uit op elk tijdstip.
Algoritmen voor autonomie
Ontwikkel de basisalgoritmen die het voertuig besturen door een getrouwe weergave van de omgeving te creëren en trajecten in die ruimte te plannen. Om de neurale netwerken te trainen om dergelijke voorstellingen te voorspellen, moeten algoritmisch nauwkeurige en grootschalige ground truth-gegevens worden gegenereerd door informatie van de sensoren van het voertuig in de ruimte en tijd te combineren. Gebruik state-of-the-art technieken om een robuust planning- en besluitvormingssysteem op te bouwen dat werkt in gecompliceerde realistische situaties die voor onzekerheid zorgen. Beoordeel uw algoritmen op de schaal van het gehele Tesla-wagenpark.
Codefundament
Doorvoer, latentie, correctheid en determinisme zijn de belangrijkste meetwaarden waarmee wij onze code optimaliseren. Leg van onderaf het fundament voor de Autopilot-software en integreer deze naadloos in onze speciale hardware. Implementeer superbetrouwbare bootloaders met ondersteuning voor draadloze updates en maak aangepaste Linux-kernels. Schrijf snelle, geheugenefficiënte low-level code om hoogfrequente gegevens in grote volumes van onze sensoren vast te leggen en deel deze met diverse verbruikersprocessen — zonder de wachttijd van het centrale geheugen te beïnvloeden of kritieke functionele code van CPU-cycli te belasten. Bereken squeeze en pipeline voor verschillende hardwareprocessors, verdeeld over diverse SoC's (System on a Chip).

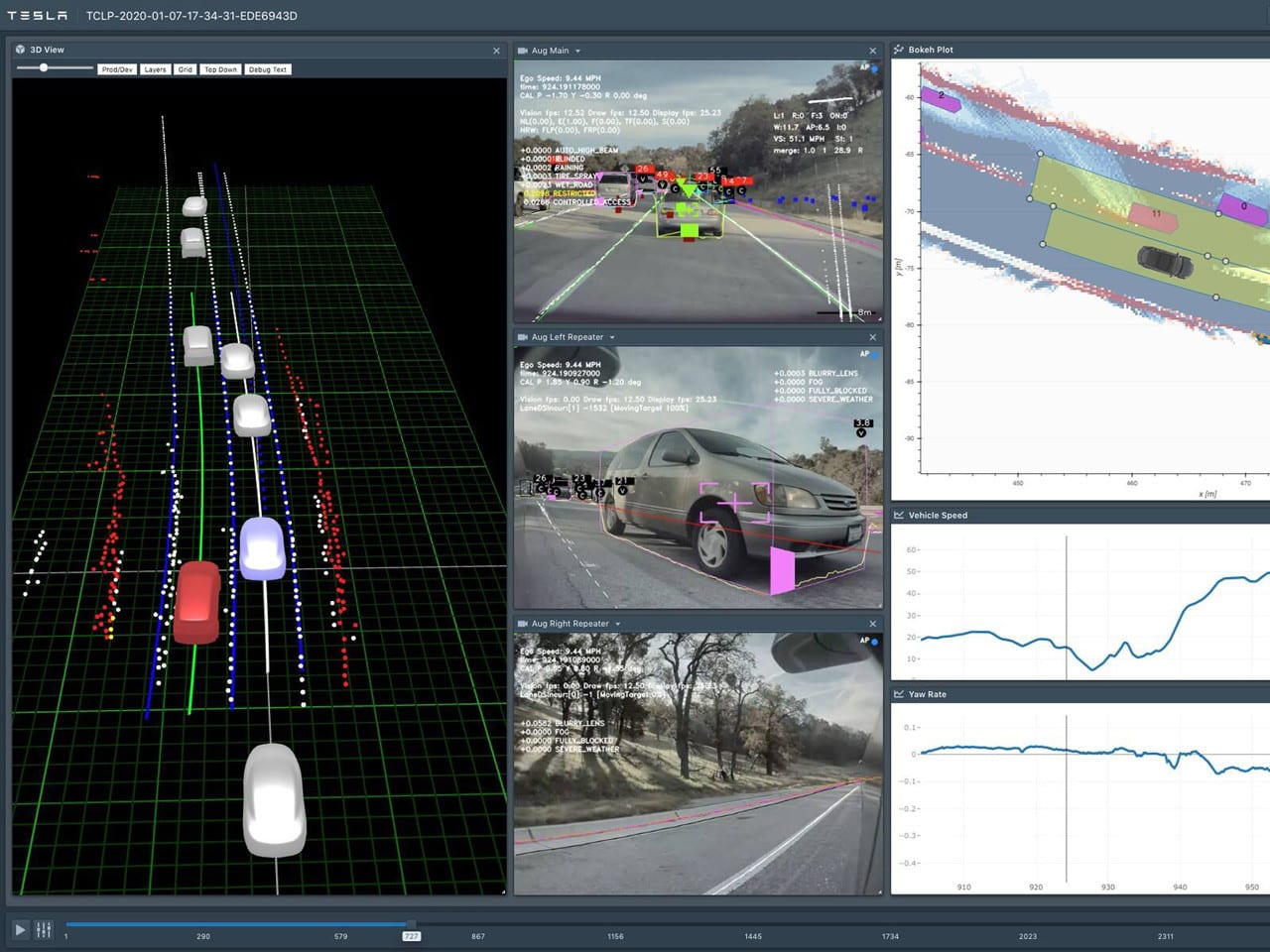
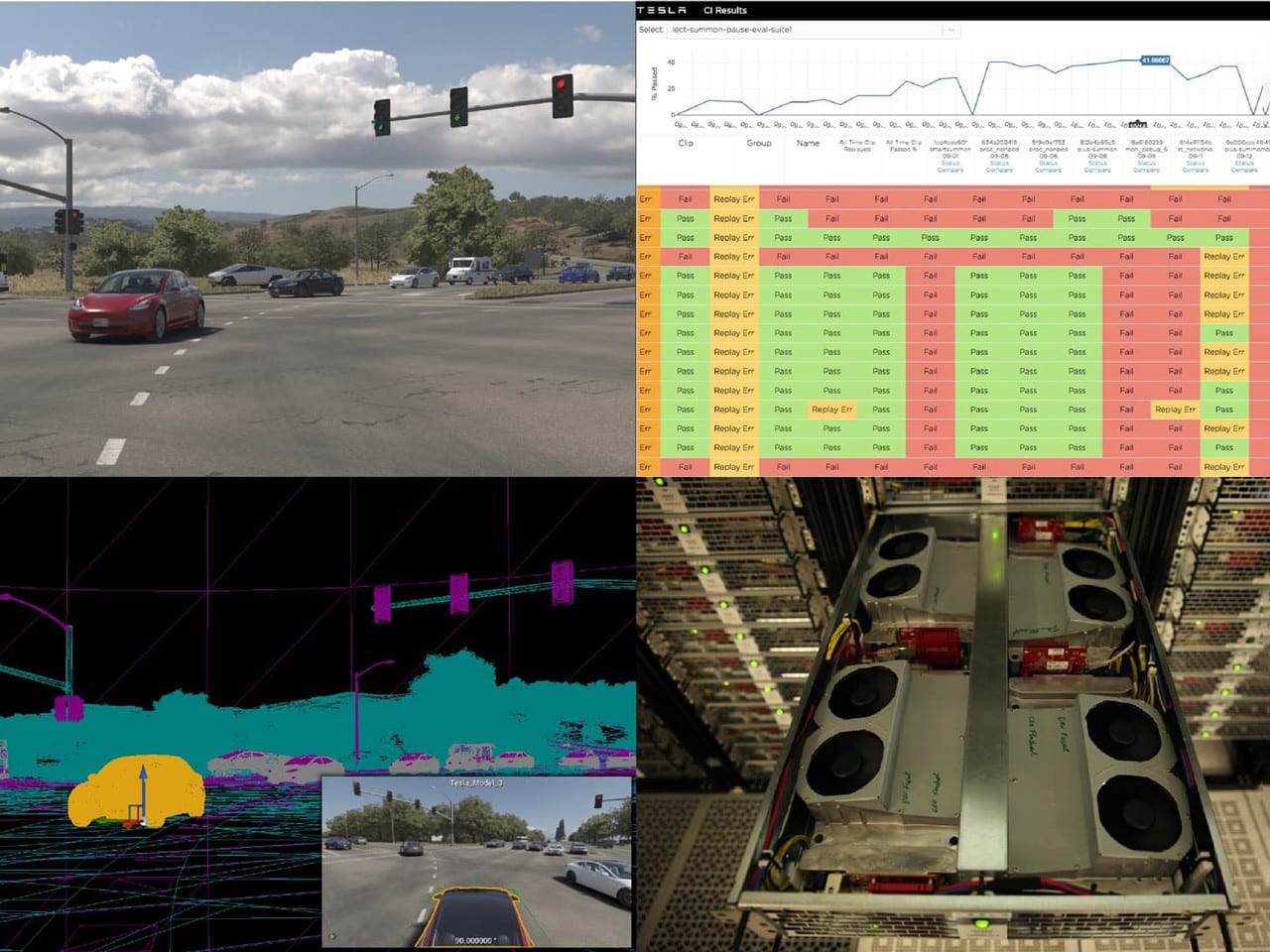
Infrastructuur voor evaluatie
Bouw evaluatietools en infrastructuur voor open-loop, closed-loop en hardware-in-the-loop op schaal, om het innovatietempo te versnellen, prestatieverbeteringen te meten en regressies te voorkomen. Maak gebruik van geanonimiseerde kenmerkende clips van ons wagenpark en integreer deze in grote pakketten testcases. Schrijf code die onze werkelijke omgeving simuleert en produceer daarbij uiterst realistische beelden en andere sensorgegevens die onze Autopilot-software voeden voor live foutopsporing of geautomatiseerd testen.
Wij bouwen aan de toekomst van Artificial Intelligence
Tesla zal de informatie die in dit formulier wordt verstrekt gebruiken om uw vraag te verwerken in overeenstemming met het privacybeleid van Tesla Talent.