IA et robotique
Nous développons et déployons l’autonomie à grande échelle dans les véhicules, les robots et plus encore. Nous sommes convaincus qu’une approche fondée sur l’intelligence artificielle avancée pour la vision et la planification, soutenue par une utilisation efficace du matériel d’inférence, est la seule manière d’obtenir une solution générale à la conduite entièrement automatique, à la robotique bipède et au-delà.
Tesla Optimus
Créez un robot humanoïde bipède autonome à usage général, capable d’effectuer des tâches dangereuses, répétitives ou ennuyeuses. Pour atteindre cet objectif final, il faut construire les piles de logiciels qui permettent l’équilibre, la navigation, la perception et l’interaction avec le monde physique. Nous embauchons des ingénieurs en apprentissage profond, vision par ordinateur, planification de mouvement, contrôles, mécanique et logiciel général pour résoudre certains de nos défis d’ingénierie les plus difficiles.

Puce de conduite entièrement autonome
Créez des puces d’inférence d’IA pour exécuter notre logiciel de conduite entièrement automatique, en tenant compte de chaque petite amélioration architecturale et micro-architecturale tout en exprimant une performance maximale du silicium par watt. Effectuez des analyses de planification, de synchronisation et de puissance sur la configuration. Rédigez des tests et des tableaux de bord robustes pour vérifier la fonctionnalité et les performances. Mettez en place des pilotes pour programmer et communiquer avec la puce, en vous concentrant sur l’optimisation des performances et la redondance. Enfin, validez la puce de silicium et amenez-la en production de masse dans nos véhicules.

Réseaux de neurones
Appliquez des recherches de pointe pour entraîner les réseaux neuronaux profonds sur des problèmes allant de la perception au contrôle. Nos réseaux par caméra analysent les images brutes pour effectuer une segmentation sémantique, une détection d’objet et une estimation de la profondeur monoculaire. Nos réseaux à vol d’oiseau prennent la vidéo de toutes les caméras pour afficher le tracé de la route, l’infrastructure statique et les objets 3D directement dans la vue descendante. Nos réseaux apprennent des scénarios les plus compliqués et les plus diversifiés au monde, provenant de façon itérative de notre parc de millions de véhicules en temps réel. Une version complète des réseaux neuronaux Autopilote implique 48 réseaux qui nécessitent 70 000 heures de processeur graphique pour s’entraîner 🔥. Ensemble, ils produisent 1 000 tenseurs distincts (prédictions) à chaque pas de temps.
Algorithmes d’autonomie
Développez les algorithmes de base qui conduisent le véhicule en créant une représentation haute fidélité du monde et en planifiant des trajets dans cet espace. Afin d’entraîner les réseaux neuronaux à prédire de telles représentations, créez par algorithmes des données de réalité du terrain précises et à grande échelle en combinant l’information des capteurs du véhicule à travers l’espace et le temps. Utilisez des techniques de pointe pour mettre en place un système de planification et de prise de décision efficace qui fonctionne dans des situations d’inquiétude réelles et complexes. Évaluez vos algorithmes à l’échelle de l’ensemble du parc Tesla.
Bases du code
Le débit, la latence, l’exactitude et le déterminisme sont les principales mesures pour lesquelles nous optimisons notre code. Construisez les bases du logiciel Autopilote à partir des niveaux les plus bas, intégrant étroitement votre matériel personnalisé. Implémentez des chargeurs d’amorçage extrêmement fiables avec une prise en charge des mises à jour à distance et affichez les noyaux Linux personnalisés. Créez des codes bas niveau rapides et efficaces sur le plan de la mémoire pour capturer des données haute fréquence et volumineuses de nos capteurs et les partager avec plusieurs processus consommateurs sans affecter la latence de l’accès mémoire centrale ni le code fonctionnel critique neutre des cycles du processeur. Compressez vos données et gérez-les au sein de différentes unités de traitement du matériel réparties sur plusieurs systèmes sur puce.

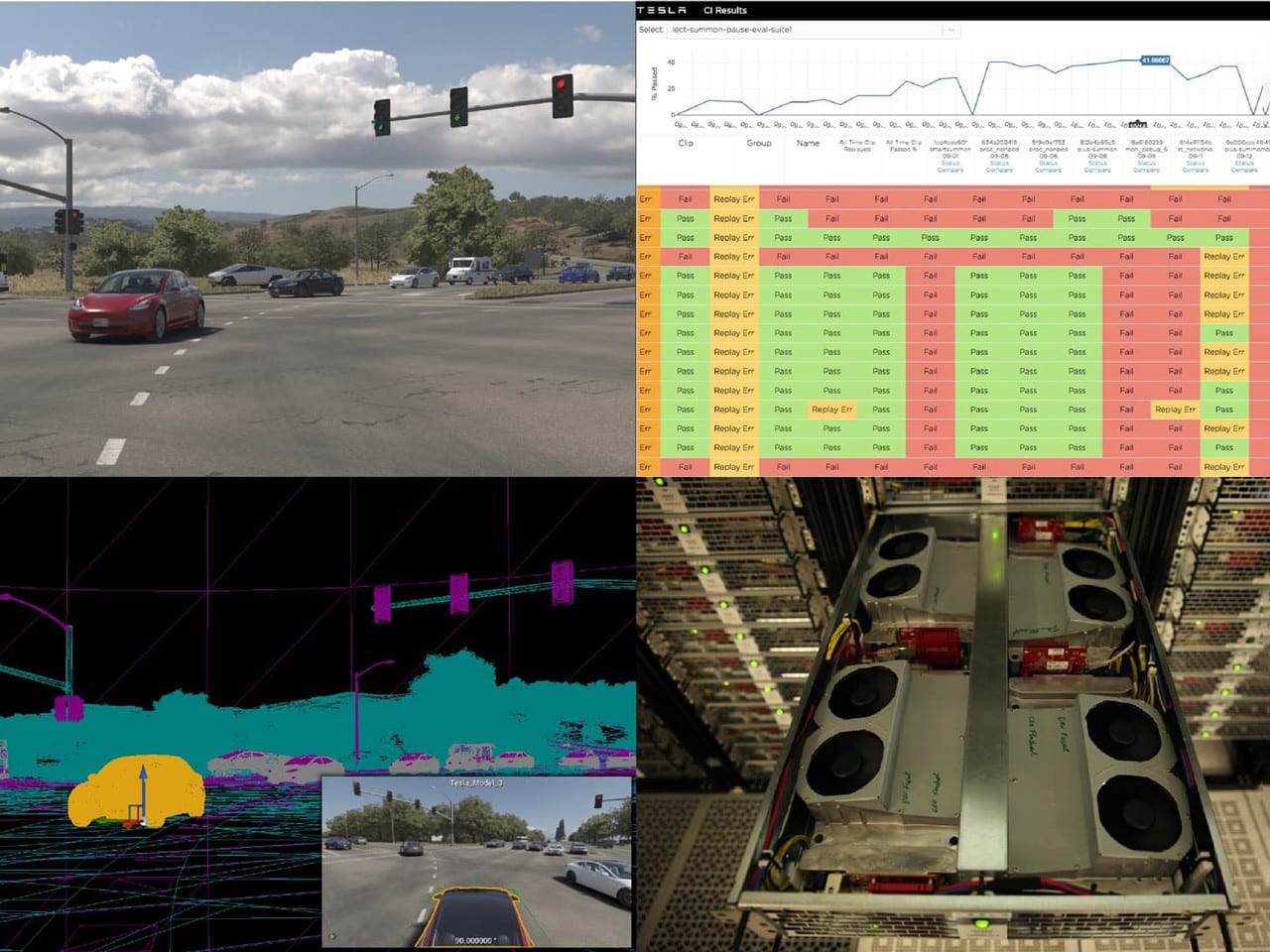
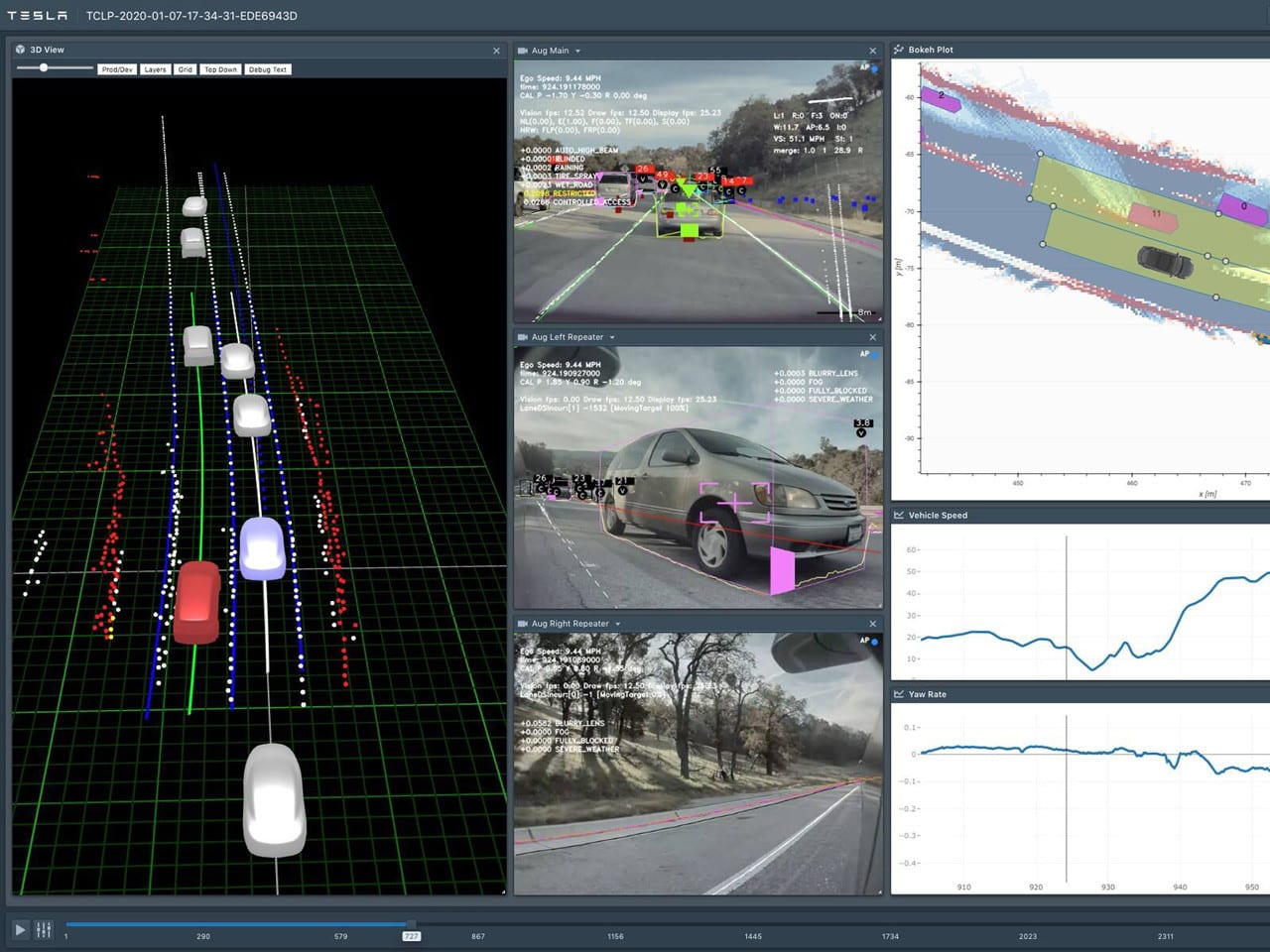
Infrastructure d’évaluation
Créez des outils et une infrastructure d'évaluation et simulations en boucle ouverte et fermée, à grande échelle, pour accélérer le rythme de l'innovation, suivre les améliorations des performances et éviter les régressions. Tirez des clips caractéristiques anonymes de notre flotte et intégrez-les dans de nombreuses séries de test. Écrivez des codes simulant notre environnement réel, produisant des graphiques hautement réalistes et d'autres données de capteur qui alimentent notre logiciel Autopilot pour le débogage en direct ou des tests automatisés.