AI og robotteknologi
Vi udvikler og implementerer autonomi i stor skala i køretøjer, robotter og mere. Vi mener, at en strategi baseret på avanceret AI med kamerabaseret syn og effektiv planlægning, understøttet af optimal brug af inferenshardware, er den eneste måde at udvikle en generel løsning for Full Self-Driving, tobenede robotter og meget mere.
Tesla Optimus
Skab en universel, to-benet, autonom og menneskelignende robot, der er i stand til at udføre farlige, gentagne eller kedelige opgaver. For at nå dette mål kræver det, at man opbygger de softwarestakke, der muliggør balance, navigation, opfattelse og interaktion med den fysiske verden. Vi ansætter maskiningeniører og generelle softwareingeniører inden for dyb læring, computersyn, bevægelsesplanlægning og styring til at løse nogle af vores sværeste tekniske udfordringer.

FSD-chip
Byg AI-inferenschips til at køre vores Full Self-Driving software. Tag højde for hver eneste lille forbedring af arkitekturen og mikroarkitekturen, mens du presser den maksimale silicium-ydeevne pr. Watt ud af chippen. Udfør udformning, timing og effektanalyser af designet. Opret robuste tests og resultattavler for at bekræfte funktionalitet og ydeevne. Implementer drivere til at programmere og kommunikere med chippen, med fokus på ydeevneoptimering og redundans. Til sidst skal du validere siliciumchippen og få den masseproduceret til brug i vores køretøjer.

Neurale netværk
Anvend banbrydende forskning til at træne avancerede neurale netværk på opgaver fra billedgenkendelse til styring. Vores kamerabaserede netværk analyserer de rå billeddata for at udføre semantisk segmentering, objektregistrering og monokulær dybdevurdering. Vores netværk med fugleperspektiv optager video fra alle kameraerne for at generere vejlayout, statisk infrastruktur og 3D-objekter direkte i visningen set fra oven. Vores netværk lærer af de mest komplicerede og forskelligartede scenarier i verden, som indsamles løbende fra vores flåde bestående af millioner af køretøjer i realtid. Færdigudvikling af neurale netværk til selvkørende funktioner omfatter 48 netværk, der kræver 70.000 GPU-timer at træne 🔥. Tilsammen genererer de 1.000 forskellige tensors (forudsigelser) for hvert punkt i tid.
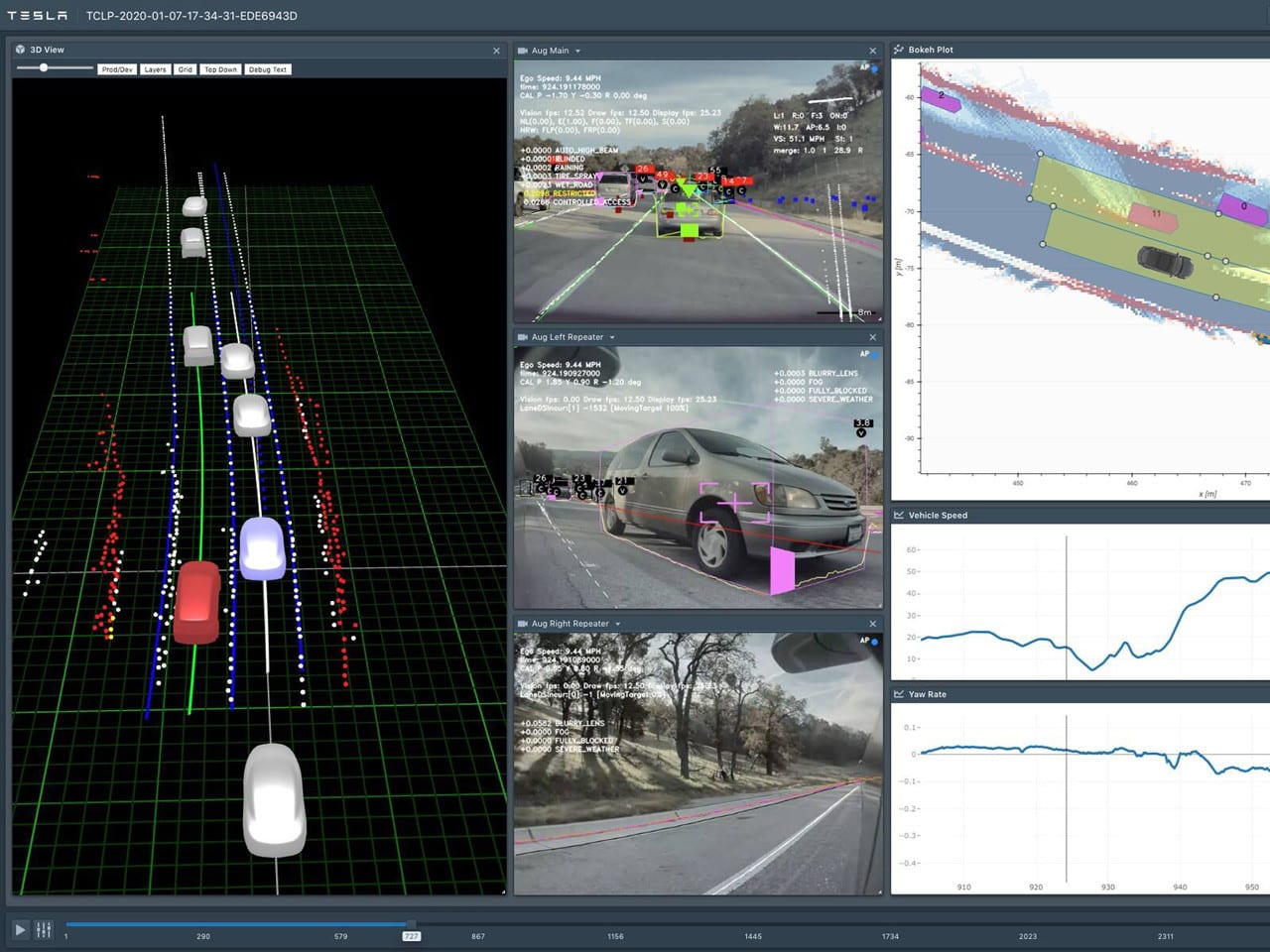
Autonomitetsalgoritmer
Vi udvikler de basisalgoritmer, der kører i køretøjet ved at skabe en gengivelse af verden i høj opløsning og planlægge trajektorier i dette rum. For at kunne optræne de neurale netværker til at kunne forudsige sådanne gengivelser, skaber vi nøjagtige, empiriske data i stor skala ved hjælp af algoritmer ved at kombinere informationer fra køretøjets sensorer i tid og rum. Vi benytter avancerede teknikker til at skabe et robust planlægnings- og beslutningstagningssystem, der opererer i komplicerede situationer fra den virkelige verden med alle dens usikkerheder. Du vil kunne evaluere dine algoritmer ved hjælp af hele Tesla-flåden.
Kodefundamenter
Overførselshastighed, latenstid, korrektion og determinisme er de primære parametre, vi benytter til optimering af vores programkode. Vi opbygger fundamentet til vores software til selvkørende funktioner fra de laveste niveauer i stakken i tæt integration med vores specialudviklede hardware. Vi implementerer superpålidelige bootloadere med understøttelse af over-the-air opdateringer og benytter tilpassede Linux-kernels. Vi programmerer hurtig, hukommelseseffektiv lavniveaukode for at indsamle højfrekvente data med høj volumen fra vores sensorer og for at dele dem med flere forbrugerprocesser — uden at det påvirker latenstiden for adgangen til den centrale hukommelse eller begrænser adgangen til CPU-cyklusser for vigtig funktionskode. Vi presser og sender beregninger på tværs af en række forskellige hardwareprocesenheder fordelt på flere system-on-chip-enheder.

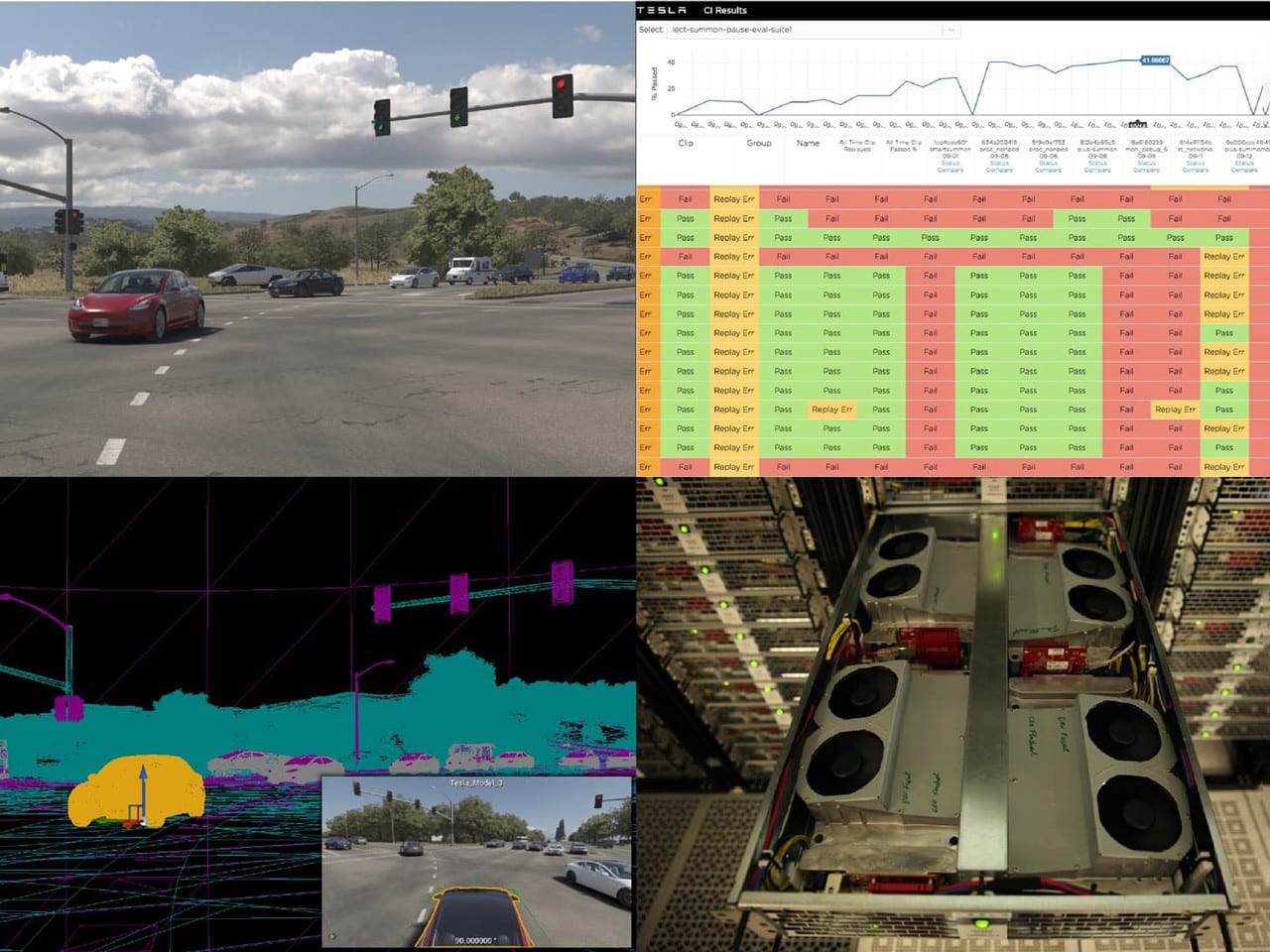
Evalueringsinfrastruktur
Vi opbygger åbne og lukkede kredsløb, evalueringsværktøjer med kredsløbsindbygget hardware og infrastruktur i stor målestok for at accelerere innovationen, holde øje med ydeevneforbedringer og forhindre regression. Vi udnytter anonymiserede, karakteristiske data fra vores flåde og integrerer dem i store suiter af testscenarier. Vi skriver kode, der simulerer vores miljø, som er baseret på den virkelige verden og producerer ultrarealistisk grafik og andre sensordata, som benyttes af vores software til selvkørende funktioner til fejlretning i realtid eller automatiserede tests.
Vær med til at bygge fremtiden for kunstig intelligens
Tesla vil benytte oplysningerne i denne formular til at behandle din forespørgsel i overensstemmelse med Teslas fortrolighedserklæring for kandidater.